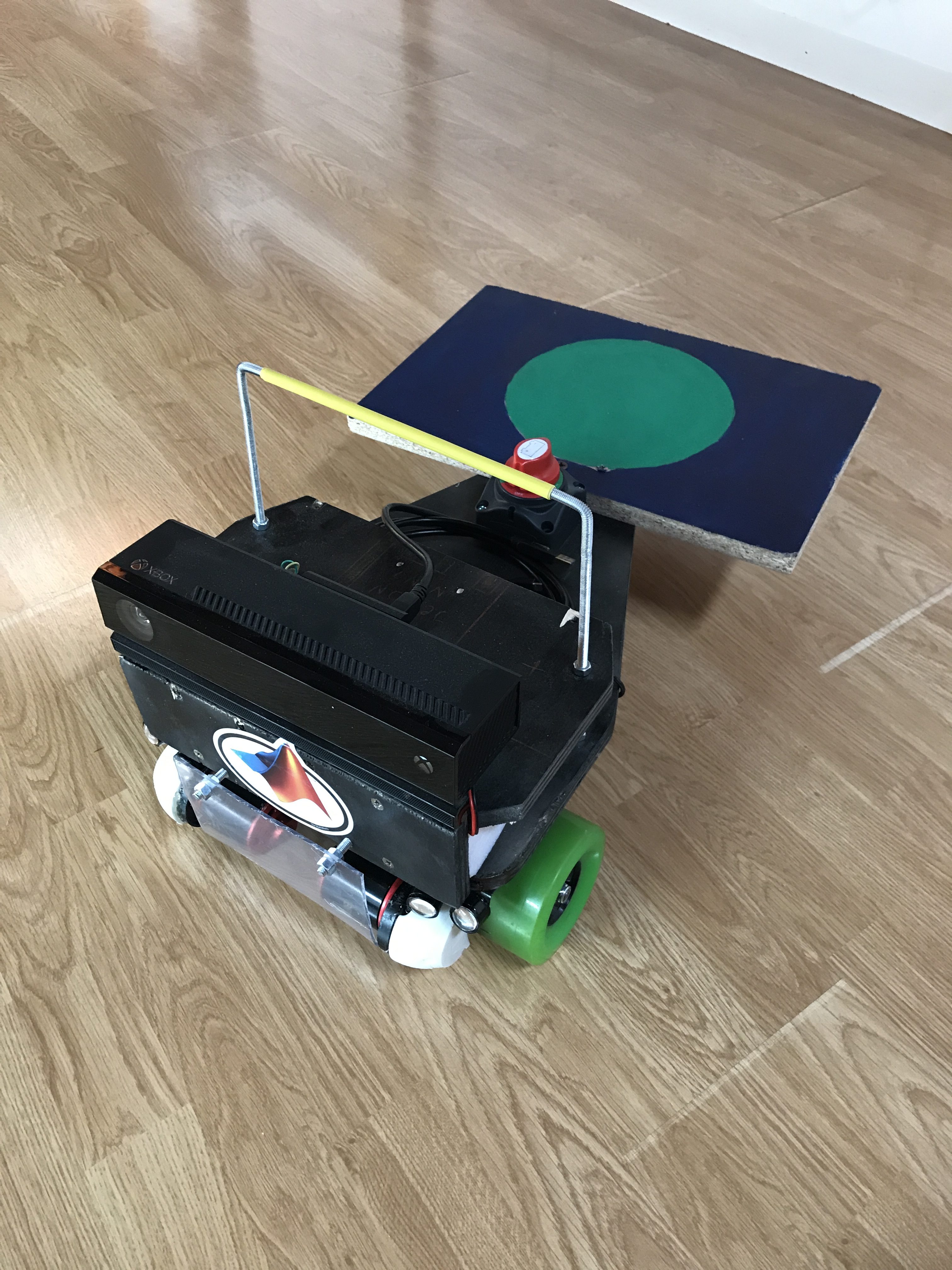
I start the ZIG project to use the knowledge to learn with the Robì project in order to build a mobile robot that can move indoors in an industrial playground
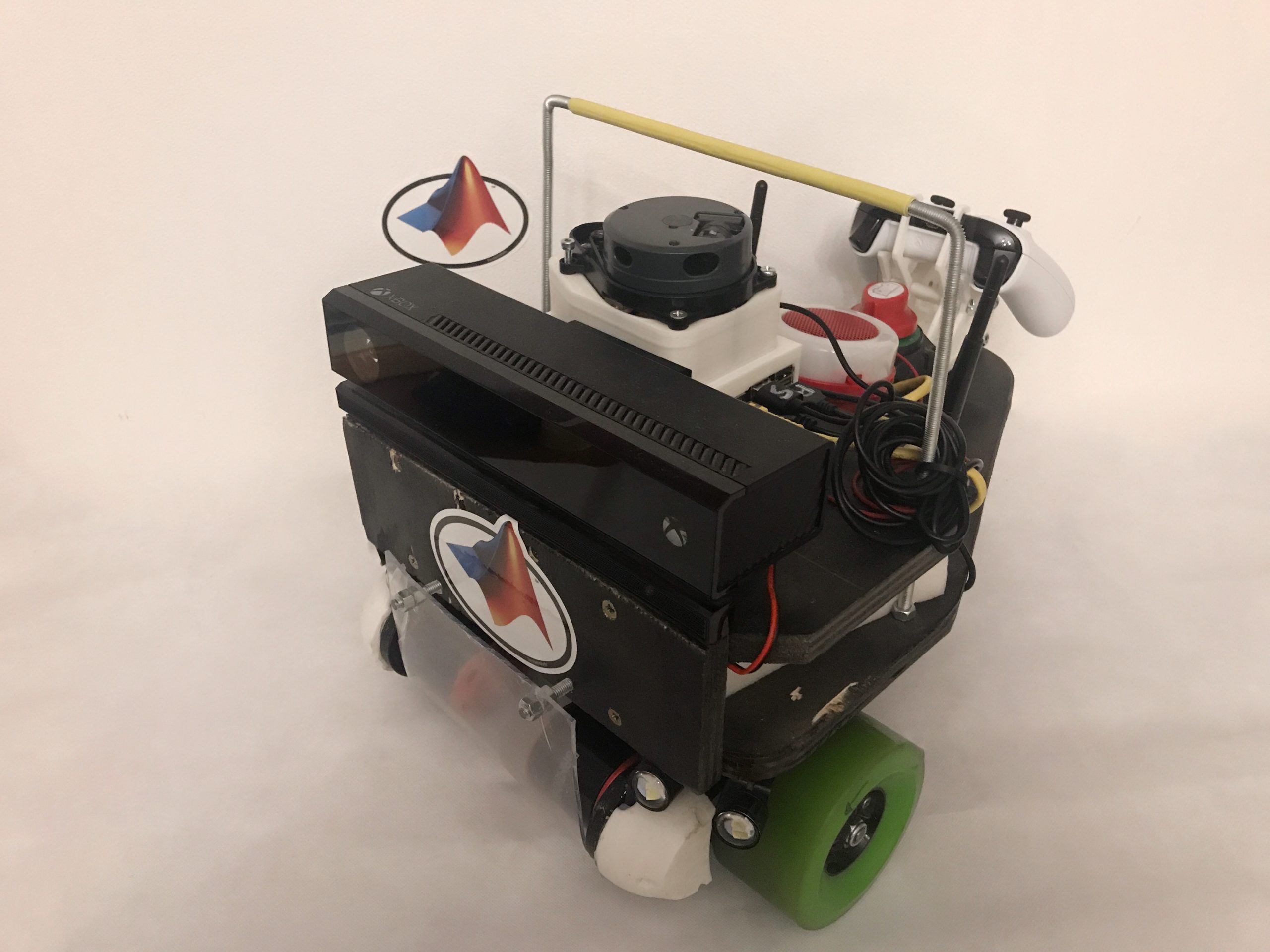
The configuration of this rover is very different from robì, in fact, this mobile robot implements a 3 wheel design and feature a closed-loop control on the speed of them using encoders.
You can also notice that this project uses a lithium battery and a centralized energy system that provide the correct voltage to any part of the rover.
For the software part, I rely on the use of a Raspberry Pi with ROS kinetic. This allows me to drive all the component of the robot in a well-established environment. Thanks to the MOPRPH project I can be able to rapidly arrive at a functioning prototype.